جدید دور میں سائنس دان اور انجینئر ہر چیز کو خودکار بنانے کی کوشش کر رہے ہیں۔ اس کا مطلب یہ ہے کہ ہر چیز بغیر کسی انسانی کوشش کے اپنے طور پر کام کرے گی۔ معاشرے میں ایک بہت ہی عام پریشانی کی نشاندہی کی گئی ہے کہ کچھ لوگوں کو خود سے اپنے جوتے باندھنے میں دشواری ہوتی ہے۔ ان لوگوں میں معذور ، کمر درد والے لوگ ، بچے اور اندھے لوگ کچھ حد تک شامل ہیں۔ لہذا ، ایک حل بنانا ہے تاکہ یہ لوگ اسے بطور پریشانی نہ دیکھیں۔

انسٹرٹ ایبلز سے لی گئی تصویر
اس پروجیکٹ میں ، ہم ایک آٹومیٹک لیکس شو کرنے جارہے ہیں جو بغیر کسی کوشش کے خود بخود اس کے لیس باندھ دے گا۔ جوت کے اندر جیسے ہی کسی نے پاؤں رکھ دیا ، یہ مائکروکانٹرولر بورڈ ، موٹر شیلڈ سینسر ، اور امدادی موٹر کی مدد سے کرے گا۔
ارڈینو کا استعمال کرتے ہوئے اپنے شو کو خود سے لگانے کا طریقہ؟
اب ، جیسا کہ ہم پروجیکٹ کا خلاصہ جانتے ہیں ، آئیے مزید معلومات اکٹھا کرنا شروع کریں اور آرڈینوو کا استعمال کرتے ہوئے اس آٹو لیس جوتا کو کیسے بنایا جائے اس طریقہ کار پر عمل کریں۔
مرحلہ 1: اجزا جمع کرنا
کسی بھی پروجیکٹ کو شروع کرنے کا بہترین نقطہ نظر یہ ہے کہ اجزاء کی ایک فہرست بنائی جائے اور ان اجزاء کا ایک مختصر مطالعہ کیا جائے کیونکہ کوئی بھی صرف اس جز کے گم ہونے کی وجہ سے کسی منصوبے کے وسط میں قائم نہیں رہنا چاہے گا۔ اس پراجیکٹ میں جن اجزاء کو ہم استعمال کرنے جارہے ہیں ان کی ایک فہرست ذیل میں دی گئی ہے۔
- اردوینو اونو
- موٹر شیلڈ
- امدادی موٹر
- فورس
- ایل. ای. ڈی
- 1 ک اوہم ریزسٹر
- جوتا
- دھات کی پٹی
- پلاسٹک زپ تعلقات
- 1/8
- جمپر تاروں
- بیٹری
مرحلہ 2: اجزاء کا مطالعہ
اب جب کہ ہم اپنے پروجیکٹ کا خلاصہ جانتے ہیں اور ہمارے پاس بھی تمام اجزاء کی مکمل فہرست موجود ہے ، آئیے ہم ایک قدم آگے بڑھائیں اور جن اجزاء کو ہم استعمال کریں گے ان کا ایک مختصر مطالعہ کریں۔
سیوڈوینو v4.2 دنیا میں ایک بہترین آردوینو مطابقت بخش بورڈ ہے جو مائکروکونٹرولر اتمیگا 328 ایم سی یو پر مبنی ہے۔ کیونکہ یہ استعمال میں آسان ہے ، زیادہ مستحکم ہے اور یہ دوسرے بہت سے بورڈوں سے بہتر دکھائی دیتا ہے۔ یہ آرڈینوو بوٹلوڈر پر مبنی ہے۔ اس میں اے ٹی ایم ای جی اے 16 یو 2 ہے جیسے کہ یو آر ٹی ٹو یو ایس بی کنورٹر ہے کیونکہ یہ جس کو ایف ٹی ڈی آئی چپ کے طور پر استعمال کیا جاسکتا ہے۔ یہ ایک مائکرو USB کیبل کا استعمال کرکے کمپیوٹر سے منسلک ہوتا ہے جسے عام طور پر ایک android کیبل کہا جاتا ہے۔ بورڈ کو طاقتور بنانے کے لئے ڈی سی جیک بھی استعمال کیا جاسکتا ہے۔ ان پٹ پاور 7V سے 15V تک ہونی چاہئے۔

سیوڈینو بورڈ
آرڈینوو موٹر شیلڈ ایک اردوینو کو استعمال کرتے ہوئے آپ کو آسانی سے موٹر سمت اور رفتار کو کنٹرول کرنے کے قابل بناتا ہے۔ آپ کو صرف آرڈینوو پنوں کو ایڈریس کرنے کے قابل بناتے ہوئے ، کسی بھی موٹر کو اپنے قدموں میں چلانا آسان بناتا ہے۔ اس کے علاوہ آپ 12v تک مختلف بجلی کی فراہمی والی موٹر کو کنٹرول کرنے کا اختیار حاصل کرسکتے ہیں۔ سب سے بہتر ، ڈھال ڈھونڈنا بہت آسان ہے۔ ان سبھی وجوہات کی بناء پر ، آرڈینوو موٹر شیلڈ اگر تیز ہراستہ پروٹو ٹائپنگ ، اور عام تجربہ کرنے کے ل your آپ کے ہتھیاروں میں تھوڑا سا ٹھنڈا ہونا ہے۔

موٹر شیلڈ
فورس سینسر ریزٹرز (FSRs) پریشر سینسر استعمال کرنے میں بہت آسان اور آسان ہیں۔ ایف ایس آر کی رکاوٹ وزن پر انحصار کرتی ہے جس کا پتہ لگانے والے علاقے پر لگایا جاتا ہے۔ آپ جتنا زیادہ وزن لگائیں گے ، اپوزیشن کی سطح کم ہوگی۔ رکاوٹ کی حد بہت بڑی ہے:> 10 MΩ (کوئی وزن نہیں) سے ~ 200 Ω (زیادہ سے زیادہ وزن)۔ زیادہ تر ایف ایس آر 100 گرام سے 10 کلو گرام کے دائرے میں طاقت کا پتہ لگاسکتے ہیں۔ ایک FSR دو پرتوں اور ایک اسپیسر چپکنے والی پر مشتمل ہے۔ جب کوئی وزن نہیں لاگو ہوتا ہے تو چلانے والی پرتیں ایک پتلی ہوا کے فرق سے الگ ہوجاتی ہیں۔ ایک فلم میں دم سے کھوج لگانے والے خط (گول حصہ) تک دو نشانات شامل ہیں۔ یہ نشانات ایک ساتھ بنے ہوئے ہیں ، اگرچہ رابطہ نہیں ہے۔ دوسری فلم میں معروف سیاہی چھپی ہوئی ہے۔ جب آپ سینسر کو آگے بڑھاتے ہیں تو ، سیاہی مخالف کے ساتھ مل کر دونوں نشانات کو شارٹ کرتی ہے جو وزن پر انحصار کرتی ہے۔

فورس سینسر
TO امدادی موٹر ایک گھومنے والی یا ایک لکیری ایککیو ایٹر ہے جس پر قابو پایا جاسکتا ہے اور عین مطابق اضافے میں منتقل کیا جاسکتا ہے۔ یہ موٹریں ڈی سی موٹروں سے مختلف ہیں۔ یہ موٹرز کونیی یا گھماؤ حرکت کے عین مطابق کنٹرول کی اجازت دیتی ہیں۔ اس موٹر میں ایک سینسر ملا ہوا ہے جو اس کی تحریک کے بارے میں آراء بھیج رہا ہے۔

سروو موٹو
مرحلہ 3: کام کرنے کا اصول
اس منصوبے کا عملی اصول بہت آسان ہے۔ اگر اس شو میں پاؤں رکھا گیا ہے یا نہیں تو اس کا پتہ لگانے کے لئے ایک فورس سینسر استعمال کیا جائے گا۔ اگر اس نے پاؤں کا سراغ لگایا تو ، یہ آرڈینو بورڈ میں سگنل بھیجے گا جو اردوینو موٹر شیلڈ کی مدد سے ایک سرو موٹر کو منتقل کرے گا۔ یہ سروو موٹر اس طرح حرکت کرے گی کہ یہ ایک ہی وقت میں سارے لیسوں کو کھینچ لے گی۔ لہذا جوتا کے تمام لیسوں کو خود بخود باندھنا۔
مرحلہ 4: اجزاء کو جمع کرنا
اب جیسا کہ ہم اس منصوبے کے پیچھے مرکزی خیال اور عملی اصول جانتے ہیں ، آئیے ہم ایک قدم آگے بڑھائیں اور ایک ایسا پروگرام بنانے کے لئے سب کچھ جمع کرنا شروع کریں جو خود بخود خود ہی پیچھے ہوجائے۔ حتمی مصنوع بنانے کے لئے ، ذیل میں دیئے گئے اقدامات سے گزریں:
- سب سے پہلے ، ایک چھوٹی سی دھات کی پلیٹ کو ٹرم کریں تاکہ یہ شو کے پچھلے حصے پر طے ہوجائے۔ مصنوعی استعمال کریں تاکہ مستقل طور پر ٹھیک ہوجائے اور ڈھیل نہ جائے۔ اس بات کو یقینی بنائیں کہ آپ دھات کی پلیٹ اور شو کے مابین کچھ فاصلہ چھوڑ دیں کیونکہ ہم اس خلا کو کچھ تار سے باندھ لیں گے۔
- اب دو سرو موٹرز لیں اور انہیں گرم گلو کے ساتھ دھات کی پلیٹ میں جوڑیں۔ اب انہیں مستقل طور پر طے کرنے کے ل around ، ان کے آس پاس زپ تعلقات استعمال کریں تاکہ یہ سرو موٹرز بعد میں حرکت میں نہ آئیں۔ امدادی موٹریں چلنے کے بعد ، بچی ہوئی اضافی کیبل کاٹ دیں۔
- اب موٹروں کے نیچے بیٹری کا معاملہ لگائیں تاکہ اس کا پاور سوئچ باہر کی طرف ہو۔
- اب موٹروں پر آرڈینو بورڈ لگائیں۔ اس سے پہلے کہ موٹر شیلڈ کو ارڈینو کے ساتھ مربوط کریں ، کچھ چیزوں کو سرکٹ میں شامل کرنے کی ضرورت ہے۔
- اس کی مثبت ٹانگ پر ایل ای ڈی اور ٹانکا لگانے والے کے لئے ایک رزسٹر لے لو اور تار کی ایک چھوٹی لمبائی کو منفی ٹانگ اور ریسٹر کے دوسرے پیر کو ٹانکا۔ پھر اس اسمبلی کو اردوینو سے جوڑیں اور اسے غیر استعمال شدہ جوتوں والی ساکٹ میں دبائیں۔
- اب ایک لے لو فورس سینسر اور اسے اپنے جوتے میں رکھیں جہاں آپ کی ایڑی آرام کرے گی۔ طاقت سینسر کے پنوں کو ٹانکا لگانے کی سفارش نہیں کی جاتی ہے کیونکہ سولڈرنگ آئرن کی حرارت سینسر کے پلاسٹک کو پگھلی سکتی ہے۔ لہذا یہ بہتر ہے اگر آپ اسے چپکائیں یا ڈکٹ ٹیپ کریں۔
- آخر میں ایک سرو ٹائپ باندھنے کے لئے زپ ٹائی کا استعمال کریں ، تاکہ جب موٹر گھومتا ہے تو ، وہ ایک ہی وقت میں تمام لیسوں کو کھینچ لے گا۔
اس بات کو یقینی بنائیں کہ ایل ای ڈی کا مثبت تار ارڈوینو کے پن 2 سے جڑا ہوا ہے۔ فورس سینسر کا وی سی سی اور گراؤنڈ پن اردوینو کے 5V اور گراؤنڈ سے منسلک ہوگا اور فورس سینسر کا IN پن اردوینو بورڈ کے A0 پن سے منسلک ہوگا۔ آخر میں ، سروو موٹر پنوں کو موٹر شیلڈ پر احتیاط سے پلگائیں تاکہ آپ غلط کنکشن نہ بنائیں۔
مرحلہ 5: ارڈینو کے ساتھ آغاز کرنا
اگر آپ اس سے قبل آرڈینوو IDE سے واقف نہیں ہیں ، تو پریشان ہونے کی فکر نہ کریں کیونکہ ذیل میں ، آپ ارڈینو آئ ڈی ای کا استعمال کرتے ہوئے مائکروکونٹرولر بورڈ پر کوڈ برننگ کے واضح اقدامات دیکھ سکتے ہیں۔ آپ آرڈینوو IDE کا تازہ ترین ورژن ڈاؤن لوڈ کرسکتے ہیں یہاں اور ذیل میں درج اقدامات پر عمل کریں:
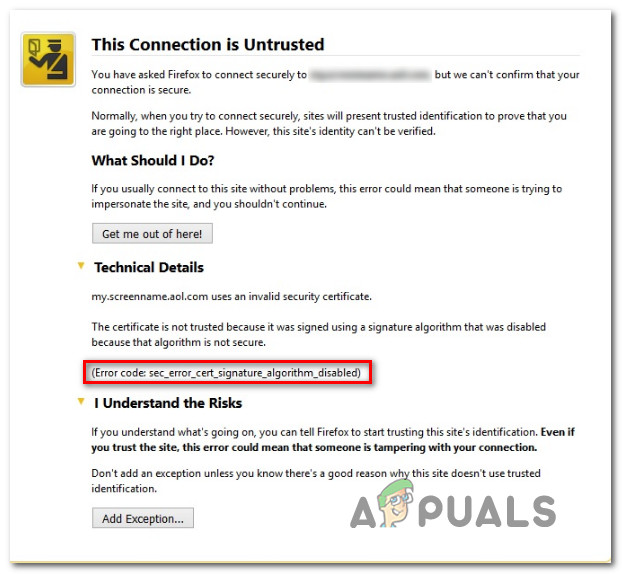
- جب ارڈینو بورڈ آپ کے کمپیوٹر سے منسلک ہوتا ہے تو ، 'کنٹرول پینل' کھولیں اور 'ہارڈ ویئر اور صوتی' پر کلک کریں۔ پھر 'ڈیوائسز اور پرنٹرز' پر کلک کریں۔ اس پورٹ کا نام تلاش کریں جس سے آپ کا ارڈینو بورڈ منسلک ہے۔ میرے معاملے میں یہ 'COM14' ہے لیکن یہ آپ کے کمپیوٹر پر مختلف ہوسکتا ہے۔

پورٹ تلاش کرنا
- ہمیں سروو موٹر استعمال کرنے کے لئے ایک لائبریری شامل کرنا ہوگی۔ لائبریری کوڈ کے ساتھ ڈاؤن لوڈ لنک میں نیچے منسلک ہے۔ کے پاس جاؤ خاکہ> لائبریری شامل کریں> زپ لائبریری شامل کریں۔

لائبریری شامل کریں
- اب آرڈینوو IDE کھولیں۔ ٹولز سے ، ارڈینو بورڈ کو سیٹ کریں اردوینو / جینیوینو یو این او۔

بورڈ مرتب کرنا
- اسی ٹول مینو سے ، پورٹ نمبر مرتب کریں جو آپ نے کنٹرول پینل میں دیکھا تھا۔

پورٹ کی ترتیب
- نیچے منسلک کوڈ ڈاؤن لوڈ کریں اور اسے اپنے IDE میں کاپی کریں۔ کوڈ اپ لوڈ کرنے کے لئے ، اپلوڈ بٹن پر کلک کریں۔

اپ لوڈ کریں





آپ کوڈ کو بذریعہ ڈاؤن لوڈ کرسکتے ہیں یہاں کلک کرنا
مرحلہ 6: کوڈ
کوڈ بہت اچھا تبصرہ کیا ہے اور خود وضاحتی ہے۔ لیکن پھر بھی ، ذیل میں کوڈ کو مختصر طور پر بیان کیا گیا ہے۔
1. شروع میں ، ایک خصوصی لائبریری شامل کی گئی ہے تاکہ سروو موٹر کو مائکرو قابو پانے والے بورڈ کے ساتھ مربوط کیا جاسکے اور اس کے ذریعے پروگرام کیا جاسکے۔ امدادی موٹر کے ساتھ استعمال کرنے کے لئے دو اشیاء بنائے گئے ہیں۔ کچھ پنوں یا ارڈینو شروع کردیئے گئے ہیں جو موٹر ڈرائیور سے منسلک ہوں گے اور کچھ متغیرات کا بھی اعلان کیا گیا ہے جس سے کچھ عارضی اقدار کی بچت ہوگی جو بعد میں مرکزی پروگرام میں استعمال ہوں گی۔
# شامل کریں // مائیکرو کرنٹ کنٹرولر بورڈ کے ساتھ سرو موٹر کو انٹرفیس کرنے کے لئے لائبریری شامل کریں۔ // امدادی اعتراض پیدا کرتا ہے 1 امدادی سرور 2؛ // servo آبجیکٹ 2 int فورسپین بنائیں = 0؛ // ینالاگ پن 0 فورس سینسر انٹ لیڈپین سے منسلک = 2؛ // ڈیجیٹل پن 2 ایل ای ڈی انٹ سوئچ پن سے منسلک = 19؛ // ینالاگ پن 5 انٹرفیس پر انلاک سوئچ سیٹ کرتا ہے۔ // فورس سینسر انٹ ویلز کی قدر؛ // سوئچ انٹ تھری ہولڈ کی قیمت = 500؛ // فورس سینسر پریشر تھریشولڈ servoUnlock = 0 کی وضاحت کرتا ہے؛ // غیر جانبدار غیر منتقلی پوزیشن (0 ڈگری) پر servo لاک = 180 پر اہم امداد متعین کرتا ہے۔ // اہم سرو کو لیس پوزیشن (180 ڈگری) انٹ سروکو انلاک 2 = 180 پر سیٹ کرتا ہے۔ // غیر جانبدار بے گھر مقام (0 ڈگری) int servoLock2 = 0 پر معاون امداد متعین کرتا ہے۔ // لیس پوزیشن (180 ڈگری) پر معاون امدادی سیٹ کرتا ہے
2 باطل سیٹ اپ () ایک ایسا فنکشن ہے جو شروع میں صرف ایک وقت چلتا ہے جب مائکرو قابو رکھنے والا اونا چلتا ہے یا قابل بٹن دب جاتا ہے۔ اس فنکشن میں ، آرڈینوو کے پنوں کو ابتدا میں بطور INPUT یا OUTPUT استعمال کیا جائے گا۔ سروو موٹر کے لئے جو آبجیکٹ پہلے تیار کیے گئے تھے ، ان کو اردوینو بورڈ کے مخصوص پن سے سرو موٹر کو منسلک کرنے کے لئے استعمال کیا جارہا ہے اور اس سرودو کو ابتدائی بے گھر حالت میں لے جایا جا رہا ہے۔ اس فنکشن میں بوڈ ریٹ بھی مرتب کیا گیا ہے۔ بؤڈ ریٹ بٹس میں ہر سیکنڈ کی رفتار ہے جس کے ذریعہ مائکرو قابو پانے والے بیرونی آلات سے منسلک ہوتا ہے۔
باطل سیٹ اپ () {سیریل.بیگین // مائکروکونٹرولر پن موڈ (لیڈپین ، آؤٹپٹ) کی باؤڈ ریٹ طے کرنا؛ // ڈیجیٹل پن 2 ایل ای ڈی پن موڈ (سوئچ پن ، ان پٹ) کے لئے آؤٹ پٹ ہے۔ // ینالاگ پن 5 سوئچ myservo.attach کے لئے ان پٹ ہے (9)؛ // سروں کو پنوں میں جوڑ دیتا ہے 9 myservo2.attach (10)؛ // پن کو 10 myservo.write (servoUllock) پر servos جوڑتا ہے؛ // امدادی 1 کو بے گھر مقامات پر منتقل کریں myservo2.write (servoUnlock2)؛ // امدادی 2 کو بے گھر مقامات پر منتقل کریں}3۔ باطل لوپ () ایک فنکشن ہے جو لوپ میں بار بار چلتا ہے۔ سب سے پہلے ، قوت سینسر کے ذریعہ پڑھی جانے والی ایک انلاگ قدر۔ اس کے بعد یہ ایک طاقتور سینسر کی قیمت کے لئے ایک حد قیمت کو منظور کرنے کا منتظر ہے۔ یہ اس جگہ پر پاؤں کے مکمل طور پر آباد ہونے کا انتظار کرے گا اور دونوں سرورز کو ایک تالا والی پوزیشن پر رکھ دے گا۔ اگر سوئچز کو دبایا جاتا ہے تو ، سروو غیر مقفل ہوجائے گا اور جب تک ایل ای ڈی سات بار بلنگ نہیں کرے گی اس کا انتظار کریں گے۔
باطل لوپ () {والو ایف = ینالاگ ریڈ (فورس پن)؛ // فورس سینسر والوز کی پڑھنے کی قیمت = ڈیجیٹل ریڈ (سوئچ پن)؛ // سوئچ کی قیمت پڑھیں اگر (والو ایف> = تھریشل ہولڈ) force // دباؤ دہلیز کے برابر یا گزرنے کے لئے فورس سینسر کا منتظر ہے اور پھر: تاخیر (1000)؛ // جوتا myservo2.write (servoLock2) میں جگہ میں قدم رکھنے کے لئے پاؤں کا انتظار کرتا ہے۔ // لاک پوزیشن میں تاخیر (1000) پر معاون امداد متعین کرتا ہے۔ // ایک سیکنڈ کا انتظار کر رہا ہے myservo.write (servoLock)؛ // نے لاک پوزیشن میں تاخیر پر اہم امداد (1000) مرتب کی۔ // ایک سیکنڈ ڈیجیٹل رائٹ (لیڈ پن ، ہائی) کا منتظر ہے۔ // ایل ای ڈی تک غیر موزوں سرور کو غیر مقفل کردیا۔ بیٹری کی زندگی کو بچانے کے لئے اس لائن کو ہٹا دیں۔ } if (valS == HIGH) {// سوئچ دبا جانے کا انتظار کرتا ہے ، اور پھر: myservo2.write (servoUnlock2)؛ // معاون سروو تاخیر کو کھولتا ہے (1000)؛ // دو سیکنڈ انتظار کر رہا ہے myservo.write (servoUlock)؛ // اہم امداد میں تاخیر کو کھولتا ہے (500)؛ // انتظار کریں ، پھر پلکیں تو ایل ای ڈی 7 بار ڈیجیٹل رائٹ (ایل ای ڈی پن ، LOW)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (لیڈ پن ، ہائی)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (ایل ای ڈی پن ، LOW)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (لیڈ پن ، ہائی)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (ایل ای ڈی پن ، LOW)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (لیڈ پن ، ہائی)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (ایل ای ڈی پن ، LOW)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (لیڈ پن ، ہائی)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (ایل ای ڈی پن ، LOW)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (لیڈ پن ، ہائی)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (ایل ای ڈی پن ، LOW)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (لیڈ پن ، ہائی)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (ایل ای ڈی پن ، LOW)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (لیڈ پن ، ہائی)؛ تاخیر (200)؛ ڈیجیٹل رائٹ (ایل ای ڈی پن ، LOW)؛ // ایل ای ڈی بند تاخیر (1000)؛ }لہذا یہ ایک شو بنانے کے لئے پورا طریقہ کار تھا جو امدادی موٹر ، مائکروکنٹرولر اور موٹر شیلڈ کی مدد سے خود بخود اپنے لیسوں کو جوڑتا ہے۔ اب جیسا کہ آپ یہ ساری طریقہ کار جانتے ہیں ، اپنے گھر پر خود سے لگاؤ شو کرنے سے لطف اٹھائیں۔