خود کار طریقے سے فرش کی صفائی کرنے والا روبوٹ نیا تصور نہیں ہے۔ لیکن ان روبوٹوں کا ایک بڑا مسئلہ ہے۔ وہ بہت مہنگے ہیں۔ کیا ہوگا اگر ہم ایک کم قیمت پر فرش کی صفائی کرنے والا روبوٹ بناسکیں جو مارکیٹ میں دستیاب روبوٹ جتنا موثر ہے۔ یہ روبوٹ الٹراسونک سینسر کا استعمال کرے گا اور اس کی راہ میں کسی بھی رکاوٹ سے بچ سکے گا۔ ایسا کرنے سے ، یہ پورے کمرے کو صاف کر دے گا۔

(یہ تصویر سرکٹ ڈائجسٹ سے لی گئی ہے)
خودکار فرش کی صفائی کرنے والا روبوٹ بنانے کے لئے الٹراسونک سینسر کا استعمال کیسے کریں؟
جیسا کہ اب ہم اپنے پروجیکٹ کا خلاصہ جانتے ہیں۔ آئیے کام شروع کرنے کے لئے کچھ اور معلومات اکٹھا کریں۔
مرحلہ 1: اجزا جمع کرنا
کسی بھی پروجیکٹ کو شروع کرنے کا بہترین نقطہ نظر یہ ہے کہ شروع میں مکمل اجزاء کی فہرست بنائی جائے اور ہر ایک جز کا مختصر مطالعہ کیا جائے۔ اس منصوبے کے وسط میں ہونے والی تکلیفوں سے بچنے میں ہماری مدد کرتا ہے۔ اس منصوبے میں استعمال ہونے والے تمام اجزاء کی ایک مکمل فہرست نیچے دی گئی ہے۔
- کار وہیل چیسیس
- بیٹری
- برش دکھائیں
مرحلہ 2: اجزاء کا مطالعہ
اب چونکہ ہمارے پاس تمام اجزاء کی مکمل فہرست موجود ہے ، آئیے ہم ایک قدم آگے بڑھائیں اور ہر ایک اجزا کے کام کا مختصرا. مطالعہ کریں۔
ارڈینو نینو ایک مائکرو قابو پانے والا بورڈ ہے جو سرکٹ میں مختلف کاموں کو کنٹرول کرنے یا انجام دینے کے لئے استعمال ہوتا ہے۔ ہم جلاتے ہیں a سی کوڈ ارڈینو نینو پر مائکروکینٹرلر بورڈ کو یہ بتانے کیلئے کہ کس طرح اور کیا کام انجام دیں۔ آرڈوینو نینو بالکل اسی طرح کی فعالیت رکھتی ہے جیسے کہ ارڈوینو یونو لیکن کافی چھوٹی سائز میں۔ ارڈینو نینو بورڈ میں مائکروقابو کرنے والا ہے اے ٹی میگا 328 پ۔

اردوینو نینو
L298N ایک اعلی موجودہ اور اعلی وولٹیج انٹیگریٹڈ سرکٹ ہے۔ یہ ایک دوہری مکمل پل ہے جو معیاری TTL منطق کو قبول کرنے کے لئے ڈیزائن کیا گیا ہے۔ اس میں دو قابل ان پٹ ہیں جو آلہ کو آزادانہ طور پر چلانے کی سہولت دیتے ہیں۔ ایک ہی وقت میں دو موٹریں منسلک اور چل سکتی ہیں۔ موٹروں کی رفتار PWM پنوں کے ذریعہ مختلف ہوتی ہے۔

L298N موٹر ڈرائیور
HC-SR04 بورڈ ایک الٹراسونک سینسر ہے جو دو اشیاء کے مابین فاصلہ طے کرنے کے لئے استعمال کیا جاتا ہے۔ اس میں ٹرانسمیٹر اور وصول کنندہ ہوتا ہے۔ ٹرانسمیٹر بجلی کے سگنل کو الٹراسونک سگنل میں تبدیل کرتا ہے اور وصول کنندہ الٹراسونک سگنل کو دوبارہ برقی سگنل میں تبدیل کرتا ہے۔ جب ٹرانسمیٹر الٹراسونک لہر بھیجتا ہے تو ، یہ کسی خاص شے سے ٹکرانے کے بعد جھلکتا ہے۔ فاصلے کا حساب وقت کے استعمال سے کیا جاتا ہے ، الٹراسونک سگنل ٹرانسمیٹر سے جانے اور واپس وصول کنندہ میں آنے کے لئے لیتا ہے۔

الٹراسونک سینسر
مرحلہ 3: اجزاء کو جمع کرنا
جیسا کہ اب ہم جانتے ہیں کہ سارے اجزاء کیسے کام کرتے ہیں ، آئیے ہم تمام اجزاء کو اکٹھا کریں اور روبوٹ بنانا شروع کریں۔
کار پہی wheelی چیسس لیں اور چیسز کے سامنے شو برش لگائیں۔ روبوٹ کے نیچے اسکاچ برائٹ ماؤنٹ کریں۔ اس بات کو یقینی بنائیں کہ یہ جوتے کے برش کے بالکل پیچھے ہے۔ اب چیسز کے اوپری حصے پر ایک چھوٹی سی بریڈ بورڈ لگا دیں اور اس کے پیچھے موٹر ڈرائیور کو جوڑیں۔ موٹر ڈرائیور سے موٹروں کے مناسب رابطے بنائیں اور احتیاط سے پن ف موٹر ڈرائیور کو ارڈینو سے جوڑیں۔ چیسیس کے پیچھے بیٹری لگائیں۔ بیٹری موٹر ڈرائیور کو طاقتور بنائے گی جو موٹروں کو طاقت بخشے گی۔ ارڈینو موٹر ڈرائیور سے بھی اقتدار لیں گے۔ وی سی سی پن اور الٹراسونک سینسر کی گراؤنڈ 5 وی اور آرڈینوو کے گراؤنڈ سے منسلک ہوگی۔

سرکٹ ڈایاگرام
مرحلہ 4: ارڈینو کے ساتھ آغاز کرنا
اگر آپ پہلے ہی آرڈینوو IDE سے واقف نہیں ہیں تو ، فکر نہ کریں کیوں کہ مائکروکونٹرولر بورڈ کے ساتھ Ardino IDE ترتیب دینے اور استعمال کرنے کے لئے مرحلہ وار طریقہ کار کی وضاحت ذیل میں کی گئی ہے۔
- ارڈینو آئ ڈی ای کا تازہ ترین ورژن ڈاؤن لوڈ کریں اردوینو
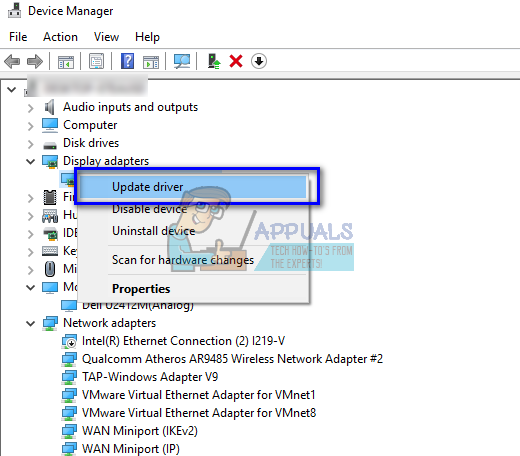
- اپنے ارڈینو نینو بورڈ کو اپنے لیپ ٹاپ سے مربوط کریں اور کنٹرول پینل کھولیں۔ کنٹرول پینل میں ، پر کلک کریں ہارڈ ویئر اور آواز . اب پر کلک کریں ڈیوائسز اور پرنٹرز۔ یہاں ، وہ بندرگاہ ڈھونڈیں جس سے آپ کا مائکروقانونی بورڈ منسلک ہے۔ میرے معاملے میں یہ ہے COM14 لیکن یہ مختلف کمپیوٹرز پر مختلف ہے۔

پورٹ تلاش کرنا
- ٹول مینو پر کلک کریں اور بورڈ کو سیٹ کریں اردوینو نینو۔

بورڈ مرتب کرنا
- اسی ٹول مینو میں ، بندرگاہ کو اس پورٹ نمبر پر سیٹ کریں جو آپ نے پہلے میں دیکھا تھا ڈیوائسز اور پرنٹرز .

پورٹ کی ترتیب
- اسی ٹول مینو میں ، پروسیسر کو سیٹ کریں اے ٹی میگا 328 پی (پرانا بوٹلوڈر)۔

پروسیسر
- نیچے منسلک کوڈ ڈاؤن لوڈ کریں اور اسے اپنے اردوینو IDE میں پیسٹ کریں۔ پر کلک کریں اپ لوڈ کریں اپنے مائکروکنٹرولر بورڈ میں کوڈ کو جلا دینے کے لئے بٹن۔

اپ لوڈ کریں





کلک کریں یہاں کوڈ ڈاؤن لوڈ کرنے کے لئے۔
مرحلہ 5: ضابطہ کو سمجھنا
کوڈ بہت اچھا تبصرہ کیا ہے اور خود وضاحتی ہے۔ لیکن پھر بھی ، اس کے نیچے مختصر طور پر وضاحت کی گئی ہے۔
1. شروع میں ، ارڈینو کے تمام پنوں جو ہم استعمال کرنے جارہے ہیں ، شروع کردیئے گئے ہیں۔
int سگھ1pin = 8؛ // پن کے لئے پہلا موٹر انٹری موٹر 1 پن 1 = 2؛ int موٹر 1pin2 = 3؛ int सक्षम2pin = 9؛ // پن کے لئے دوسرا موٹر انٹر موٹر 2 پن 1 = 4؛ int موٹر 2 پن 2 = 5؛ const int ٹرگ پن = 11؛ // الٹراسونک سینسر انسٹیٹیوٹ ایکو پن کے لئے پنوں = 10؛ const int buzzPin = 6؛ طویل مدت؛ // الٹراسونک سینسر فلوٹ فاصلہ کے لئے متغیرات؛
2 باطل سیٹ اپ () وہ فنکشن ہے جس میں ہم نے تمام پنوں کو INPUT یا OUTPUT کے بطور استعمال کرنے کے لئے سیٹ کیا ہے۔ اس فنکشن میں بوڈ ریٹ بھی مرتب کیا گیا ہے۔ بوڈ کی شرح وہ رفتار ہے جس کے ذریعہ مائکروقانونی بورڈ منسلک سینسر کے ساتھ بات چیت کرتا ہے۔
باطل سیٹ اپ () {سیریل.بیگین (9600)؛ پن موڈ (ٹرگ پن ، آؤٹ پٹ)؛ پن موڈ (ایکو پن ، ان پٹ)؛ پن موڈ (بز پن ، آؤٹ پٹ)؛ پن موڈ (قابل 1 پن ، آؤٹ پٹ)؛ پن موڈ (قابل 2 پن ، آؤٹ پٹ)؛ پن موڈ (موٹر 1 پن 1 ، آؤٹ پٹ)؛ پن موڈ (موٹر 1 پن 2 ، آؤٹ پٹ)؛ پن موڈ (موٹر 2 پن 1 ، آؤٹ پٹ)؛ پن موڈ (موٹر 2 پن 2 ، آؤٹ پٹ)؛ }3۔ باطل لوپ () ایک ایسا فنکشن ہے جو ایک لوپ میں مسلسل چلتا ہے۔ اس لوپ میں ، ہم نے مائکروکینٹرلر کو بتایا ہے کہ اگر 50 سینٹی میٹر میں کوئی رکاوٹ نہیں پائی جاتی ہے تو کب آگے بڑھیں۔ جب رکاوٹ پائے جانے پر روبوٹ تیز دائیں مڑ لے گا۔
باطل لوپ () {ڈیجیٹل رائٹ (ٹرگ پن ، LOW)؛ تاخیرمیکرو سیکنڈ (2)؛ ڈیجیٹل رائٹ (ٹرگ پن ، ہائی)؛ تاخیرمیکرو سیکنڈ (10)؛ ڈیجیٹل رائٹ (ٹرگ پن ، LOW)؛ دورانیہ = پلس ان (ایکو پن ، ہائی)؛ فاصلہ = 0.034 * (مدت / 2)؛ if (فاصلہ> 50) // اگر رکاوٹ نہ ملنے پر آگے بڑھیں {ڈیجیٹل رائٹ (قابل 1 پن ، HIGH)؛ ڈیجیٹل رائٹ (قابل 2 پن ، ہائی)؛ ڈیجیٹل رائٹ (موٹر 1 پن 1 ، ہائی)؛ ڈیجیٹل رائٹ (موٹر 1 پن 2 ، کم)؛ ڈیجیٹل رائٹ (موٹر 2 پن 1 ، ہائی)؛ ڈیجیٹل رائٹ (موٹر 2 پن 2 ، کم)؛ } ورنہ اگر (فاصلہ)<50) // Sharp Right Turn if an obstacle found { digitalWrite(enable1pin, HIGH); digitalWrite(enable2pin, HIGH); digitalWrite(motor1pin1, HIGH); digitalWrite(motor1pin2, LOW); digitalWrite(motor2pin1, LOW); digitalWrite(motor2pin2, LOW); } delay(300); // delay }اب ، جیسا کہ ہم نے ہر چیز پر تبادلہ خیال کیا ہے جسے آپ خود بخود فرش کی صفائی کا روبوٹ بنانے کی ضرورت ہے ، اپنی کم قیمت اور موثر فرش کی صفائی والے روبوٹ بنانے سے لطف اٹھائیں۔