
دنیا تیزی سے آگے بڑھ رہی ہے ، اور الیکٹرانکس کے میدان میں بھی ٹیکنالوجی اس کے ساتھ آگے بڑھ رہی ہے۔ اس جدید دور کی ہر چیز ہوشیار ہو رہی ہے۔ ہم کوڑے دان کو اسمارٹ کیوں نہیں بناتے ہیں؟ یہ ایک عام مسئلہ ہے جو ہمارے گردونواح میں دیکھا جاتا ہے کہ بیشتر کوڑے دان اوپر سے ڈھک جاتے ہیں۔ لوگ اس میں اپنا دال پھینکنے کے لئے ڑککن کو چھو کر اسے کھولنے میں بے چین محسوس کرتے ہیں۔ ہم ردی کی ٹوکری کے ڈھکن کو خود کار طریقے سے کچھ لوگوں کے اس مسئلے کو حل کرسکتے ہیں۔

اسمارٹ ٹریش اسکین
اسمارو ٹریش اسکین بنانے کے لئے سروو موٹر کے ساتھ ایک اردوینو اور ایک الٹراسونک سینسر بھی شامل کیا جاسکتا ہے۔ اگر اس بن کے سامنے کچھ ردی کی ٹوکری کا پتہ لگ جاتا ہے تو ، یہ خود بخود اس کا ڑککن کھول دے گا اور کچھ سیکنڈ کی تاخیر کے بعد ڑککن بند ہوجائے گا۔
ارڈینو کے استعمال سے ڈسٹ بٹن کے ڈھکن کو خود بخود کیسے کھولیں اور بند کریں؟
اب جیسا کہ ہم پروجیکٹ کا خلاصہ جانتے ہیں ، آئیے ہم آگے بڑھیں اور اجزاء ، کام کرنے اور سرکٹ ڈایاگرام کے بارے میں مزید معلومات اکٹھا کرنا شروع کریں تاکہ منصوبے پر فوری طور پر کام شروع کیا جاسکے۔
مرحلہ 1: اجزا جمع کرنا
اگر آپ کسی بھی پروجیکٹ کے وسط میں کسی قسم کی تکلیف سے بچنا چاہتے ہیں تو ، بہترین نقطہ نظر یہ ہے کہ ہم ان تمام اجزاء کی مکمل فہرست بنائیں جو ہم استعمال کر رہے ہیں۔ دوسرا مرحلہ ، سرکٹ بنانا شروع کرنے سے پہلے ، ان تمام اجزاء کا ایک مختصر مطالعہ کرنا ہے۔ اس پراجیکٹ میں ان تمام جزو کی فہرست ہے جن کی ہمیں ضرورت ہے۔
- [ایمیزون لنک = 'B07QTQ72GJ' عنوان = 'اردوینو نینو' /]
- [ایمیزون لنک = 'B07JJSGL5S' عنوان = 'الٹراسونک سینسر' /]
- [ایمیزون لنک = 'B07D3L25H3 ″ عنوان =' امدادی موٹر '/]
- [ایمیزون لنک = 'B07PPP185M' عنوان = 'بریڈ بورڈ' /]
- [ایمیزون لنک = 'B01D9ZM6LS' عنوان = 'بریڈ بورڈ جمپر تاروں' /]
- [ایمیزون لنک = 'B07QNTF9G8 ″ عنوان =' ارڈینو کے لئے 5V پاور اڈاپٹر '/]
مرحلہ 2: اجزاء کا مطالعہ
اب ، جیسے ہمارے پاس تمام اجزاء کی ایک مکمل فہرست موجود ہے ، آئیے ہم ایک قدم آگے بڑھیں اور ہر جزو کے کام کا ایک مختصر مطالعہ کریں۔
اردوینو نینو ایک روٹی بورڈ دوستانہ مائکرو قابو پانے والا بورڈ ہے جو سرکٹ میں مختلف کاموں کو کنٹرول کرنے یا انجام دینے کے لئے استعمال ہوتا ہے۔ ہم جلاتے ہیں a سی کوڈ ارڈینو نینو پر مائکروکینٹرلر بورڈ کو یہ بتانے کیلئے کہ کس طرح اور کیا کام انجام دیں۔ آرڈوینو نینو بالکل اسی طرح کی فعالیت رکھتی ہے جیسے کہ ارڈوینو یونو لیکن کافی چھوٹی سائز میں۔ ارڈینو نینو بورڈ میں مائکروقابوتی ہے اے ٹی میگا 328 پ۔ اگر آپ کے پاس اردوینو نینو نہیں ہیں تو ، آپ ارڈینوو یونو یا آرڈینو مگا بھی استعمال کرسکتے ہیں۔

اردوینو نینو
HC-SR04 بورڈ ایک الٹراسونک سینسر ہے جو دو اشیاء کے مابین فاصلہ طے کرنے کے لئے استعمال کیا جاتا ہے۔ اس میں ٹرانسمیٹر اور وصول کنندہ ہوتا ہے۔ ٹرانسمیٹر بجلی کے سگنل کو الٹراسونک سگنل میں تبدیل کرتا ہے اور وصول کنندہ الٹراسونک سگنل کو دوبارہ برقی سگنل میں تبدیل کرتا ہے۔ جب ٹرانسمیٹر الٹراسونک لہر بھیجتا ہے تو ، یہ کسی خاص شے سے ٹکرانے کے بعد جھلکتا ہے۔ فاصلے کا حساب وقت کے استعمال سے کیا جاتا ہے ، الٹراسونک سگنل ٹرانسمیٹر سے جانے اور واپس وصول کنندہ میں آنے کے لئے لیتا ہے۔

الٹراسونک سینسر۔
TO امدادی موٹر ایک گھومنے والی یا ایک لکیری ایککیو ایٹر ہے جس کو قابو کیا جاسکتا ہے اور عین مطابق اضافے میں منتقل کیا جاسکتا ہے۔ یہ موٹریں ڈی سی موٹروں سے مختلف ہیں۔ یہ موٹرز کونیی یا گھماؤ حرکت کے عین مطابق کنٹرول کی اجازت دیتی ہیں۔ اس موٹر میں ایک سینسر ملا ہوا ہے جو اس کی تحریک کے بارے میں آراء بھیج رہا ہے۔

امدادی موٹر
مرحلہ 3: کام کی تفہیم
ہم ایک ڈسٹ بن بنا رہے ہیں جس کا ڑککن خود بخود کھل جائے گا اور قریب ہوجائے گا اور اسے جسمانی طور پر چھونے کی ضرورت نہیں ہوگی۔ ہمیں ابھی ردی کی ٹوکری میں رکھنا پڑے گا۔ الٹراسونک سینسر خود بخود کوڑے دان کا پتہ لگائے گا اور سروو موٹر کی مدد سے ڈھکن کھولے گا۔ جب ڑککن کھلا تو ہم ردی کی ٹوکری کو ڈبوں میں ڈالیں گے اور جب ہم کام ہوجائیں گے تو ، کچھ سیکنڈ کی تاخیر کے بعد ڑککن خود بخود بند ہوجائے گا۔ اس پروجیکٹ کے پیچھے کام کرنے کا یہ آسان اصول ہے۔
مرحلہ 4: اجزاء کو جمع کرنا
- ایک ڈبے کے کنارے روٹی بورڈ منسلک کریں۔ اس میں ایک ارڈینو نینو بورڈ داخل کریں۔
- بن کے سامنے الٹراسونک سینسر منسلک کریں۔ سینسر کا سامنا تھوڑا سا اوپر کی طرف تھوڑا سا اوپر ہونا چاہئے۔
- سروو موٹر لے لو اور اس میں سرو بازو ٹھیک کرو۔ گرم گلو کی مدد سے بن اور ڑککن کے مشترکہ پر سرو موٹر منسلک کریں۔
- اب متصل تاروں کے ذریعے تمام رابطے بنائیں۔ ون اور موٹر کی گراؤنڈ اور الٹراسونک سینسر کو 5 وی اور اردوینو کی گراؤنڈ سے مربوط کریں۔ سینسر کے ٹرگر پن کو پن 2 اور ایکو پن کو ارڈینو کے پن 3 سے مربوط کریں۔ سروو موٹر کے پی ڈبلیو ایم پن کو اردوینو کے پن 5 سے مربوط کریں۔
- اب چونکہ سرکٹ کے سبھی رابطے بن گئے ہیں ، اس کی طرح نظر آنی چاہئے۔

سرکٹ ڈایاگرام

مرحلہ 5: ارڈینو کے ساتھ آغاز کرنا
اگر آپ آرڈینوو IDE سے پہلے ہی واقف نہیں ہیں تو ، فکر نہ کریں کیونکہ مائیکروکونٹرولر بورڈ کے ساتھ ارڈینو IDE ترتیب دینے اور استعمال کرنے کے لئے مرحلہ وار طریقہ کار کی وضاحت ذیل میں کی گئی ہے۔
- آرڈینوو IDE کا تازہ ترین ورژن ڈاؤن لوڈ کریں اردوینو
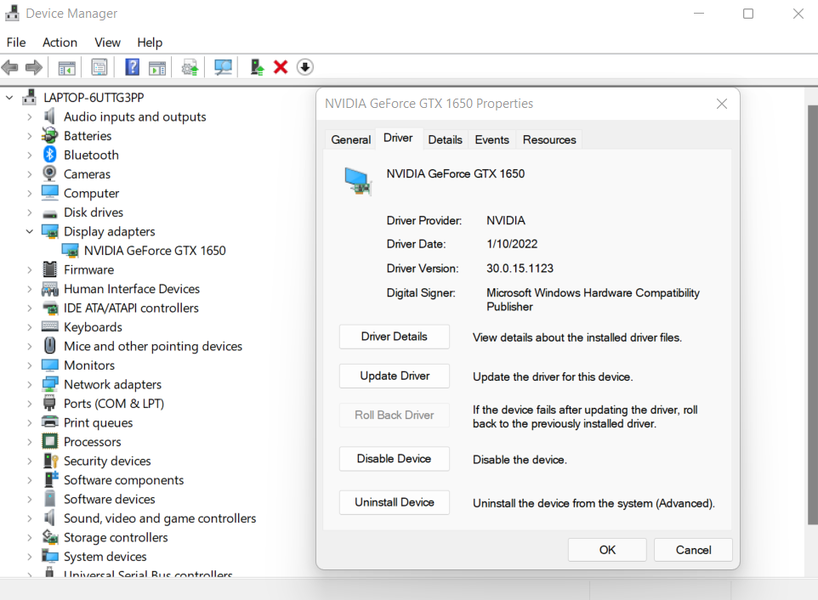
- اپنے ارڈینو نینو بورڈ کو اپنے لیپ ٹاپ سے مربوط کریں اور کنٹرول پینل کھولیں۔ کنٹرول پینل میں ، پر کلک کریں ہارڈ ویئر اور آواز . اب پر کلک کریں ڈیوائسز اور پرنٹرز۔ یہاں ، وہ بندرگاہ ڈھونڈیں جس سے آپ کا مائکرو قابو پانے والا بورڈ منسلک ہے۔ میرے معاملے میں یہ ہے COM14 لیکن یہ مختلف کمپیوٹرز پر مختلف ہے۔

پورٹ تلاش کرنا
- ٹول مینو پر کلک کریں۔ اور بورڈ لگا دیا اردوینو نینو ڈراپ ڈاؤن مینو سے

بورڈ مرتب کرنا
- اسی ٹول مینو میں ، بندرگاہ کو اس پورٹ نمبر پر سیٹ کریں جس کا مشاہدہ آپ نے پہلے میں کیا تھا ڈیوائسز اور پرنٹرز .

پورٹ کی ترتیب
- اسی ٹول مینو میں ، پروسیسر کو سیٹ کریں ATmega328P (پرانا بوٹلوڈر)۔

پروسیسر
- امدادی موٹروں کو چلانے کے لئے کوڈ لکھنے کے ل we ، ہمیں ایک خصوصی لائبریری کی ضرورت ہے جو امدادی موٹرز کے ل functions کئی کام لکھنے میں ہماری مدد کرے گی۔ یہ لائبریری کوڈ کے ساتھ ساتھ ، نیچے دیئے گئے لنک میں منسلک ہے۔ لائبریری کو شامل کرنے کے لئے ، پر کلک کریں خاکہ> لائبریری شامل کریں> زپ شامل کریں۔ کتب خانہ.

لائبریری شامل کریں
- نیچے منسلک کوڈ ڈاؤن لوڈ کریں اور اسے اپنے اردوینو IDE میں پیسٹ کریں۔ پر کلک کریں اپ لوڈ کریں اپنے مائکروکانٹرولر بورڈ پر کوڈ کو جلانے کے لئے بٹن۔

اپ لوڈ کریں






کوڈ ڈاؤن لوڈ کرنے کیلئے ، یہاں کلک کریں.
مرحلہ 6: ضابطہ کو سمجھنا
کوڈ پر خوب تبصرہ کیا گیا ہے لیکن پھر بھی ، اس کے نیچے مختصر طور پر وضاحت کی گئی ہے۔
1. شروع میں ، ایک لائبریری شامل کی گئی ہے تاکہ ہم سرو موٹر کو چلانے کے لئے بلٹ ان افعال استعمال کرسکیں۔ ارڈینو نینو بورڈ کے دو پنوں کو بھی شروع کیا گیا ہے تاکہ وہ الٹراسونک سینسر کے ٹرگر اور ایکو پن کے لئے استعمال ہوسکیں۔ ایک شے بھی بنائی گئی ہے تاکہ اس کو امدادی موٹروں کے ل values اقدار کو متعین کرنے کے لئے استعمال کیا جاسکے۔ دو متغیرات کا بھی اعلان کیا گیا ہے تاکہ الٹراسونک سگنل کے فاصلے اور وقت کی قیمت کو بچایا جا سکے اور پھر فارمولے میں استعمال کیا جاسکے۔
# شامل کریں // امدادی موٹر امدادی خدمت کے ل Library لائبریری شامل کریں۔ // امدادی موٹر انٹ کانس ٹرگرپن کے لئے کسی شے کا اعلان کریں = 2؛ // الٹراسونک سینسر انٹ کانٹ ایکوپین کے ٹرگر کے ساتھ آرڈینو کے پن 2 کو جوڑیں = 3؛ // الٹراسونک سینسر کی مدت ، فاصلہ کی بازگشت کے ساتھ ارڈینو کے پن3 کو مربوط کریں۔ // الٹراسونک سگنل کی دوری اور قسم کو ذخیرہ کرنے کے لئے متغیرات کا اعلان کریں
2 باطل سیٹ اپ () ایک ایسا فنکشن ہے جس میں ہم ارڈینو بورڈ کے پنوں کو ان پٹ یا آؤٹ پٹ کے بطور استعمال کیا جائے۔ ٹرگر پن آؤٹ پٹ کے طور پر استعمال ہوگا اور ایکو پن کو ان پٹ کے بطور استعمال کیا جائے گا۔ ہم نے اس چیز کو استعمال کیا ہے امدادی ، موٹر کو آرڈینو نینو کے 5 پن پر مربوط کرنے کے ل.۔ پن 5 PWM سگنل بھیجنے کے لئے استعمال کیا جا سکتا ہے۔ اس فنکشن میں بوڈ کی شرح بھی مقرر کی گئی ہے۔ باؤڈ کی شرح بٹس فی سیکنڈ کی رفتار ہے جس کے ذریعہ مائکروقابو کنٹرولر بیرونی آلات کے ساتھ بات چیت کرتا ہے۔
باطل سیٹ اپ () {سیریل.بیگین (9600)؛ // مائکروکانٹرلر پن موڈ (ٹرگ پن ، آؤٹپٹ) کی باؤڈ ریٹ طے کرنا۔ // ٹرگر پن کو آؤٹ پٹ پنموڈ (ایکو پن ، ان پٹ) کے بطور استعمال کیا جائے گا۔ // ایکو پن ان پٹ servo.attach (5) کے طور پر استعمال ہوگا۔ // اردوینو کے پن 5 پر سرو موٹر کو منسلک کریں}3۔ باطل لوپ () ایک فنکشن ہے جو لوپ میں بار بار چلتا ہے۔ اس لوپ میں ، ایک الٹراسونک لہر آس پاس میں بھیجی جاتی ہے اور واپس موصول ہوتی ہے۔ سینسر چھوڑنے اور اس پر واپس آنے کے ل covered سگنل کے ذریعہ لگے ہوئے وقت کا استعمال کرتے ہوئے فاصلہ طے کیا جاتا ہے۔ پھر شرط اسی کے مطابق فاصلے پر لاگو ہوتی ہے۔
باطل لوپ () {ڈیجیٹل رائٹ (ٹرگرپن ، ایچ ای ٹی)؛ // آس پاس کی تاخیر میں الٹراسونک سگنل بھیجنا (1)؛ ڈیجیٹل رائٹ (ٹرگ پن ، LOW)؛ // ایکو پن کی مدت میں پلس ان پٹ کی پیمائش کریں = پلس ان (ایکو پن ، ایچ ای ٹی)؛ // فاصلہ نصف مدت ہے جو 29.1 (ڈیٹاشیٹ سے) فاصلہ = (مدت / 2) / 29.1 کے ذریعہ تقسیم کیا گیا ہے۔ // اگر فاصلہ 0.5 میٹر سے کم اور 0 سے زیادہ (0 یا اس سے کم حد سے زیادہ ذرائع) اگر (فاصلہ = 0) {servo.write (50)؛ تاخیر (3000)؛ } دوسری {servo.writ (160)؛ }اب جیسا کہ ہم اس حیرت انگیز پراجیکٹ کو بنانے کے ل. تمام اقدامات جانتے ہیں ، جلدی کرو اور اپنا اسمارٹ ردی کی ٹوکری بنانے سے لطف اٹھائیں۔

![[تازہ کاری] ٹویٹر نے واضح کیا کہ اگلے ماہ سے کن ‘غیر فعال’ اکاؤنٹس کو حذف کرنے کے لئے نشان زد کیا جائے گا](https://jf-balio.pt/img/news/00/twitter-clarifies-about-which-inactive-accounts-will-be-marked.png)









![[FIX] ‘لابی میں شامل ہونے میں ناکام‘ کسی انسان کے اسکائی میں غلطی](https://jf-balio.pt/img/how-tos/65/failed-join-lobby-error-no-man-s-sky.png)
